
Investigadores del MIT crearon un robot impreso en 3D que es lo suficientemente flexible como para ser manipulado por imanes.
Puede arrastrarse, rodar y atrapar objetos. Esperan usar esta tecnología para tratar y evaluar a los humanos.
Se podría usar en una nueva técnica de impresión para desarrollar dispositivos biomédicos controlados a distancia.
Los ingenieros de MIT han creado estructuras blandas, impresas en 3 D cuyos movimientos se pueden controlar con una onda de un imán, muy similar a las marionetas sin cuerdas.
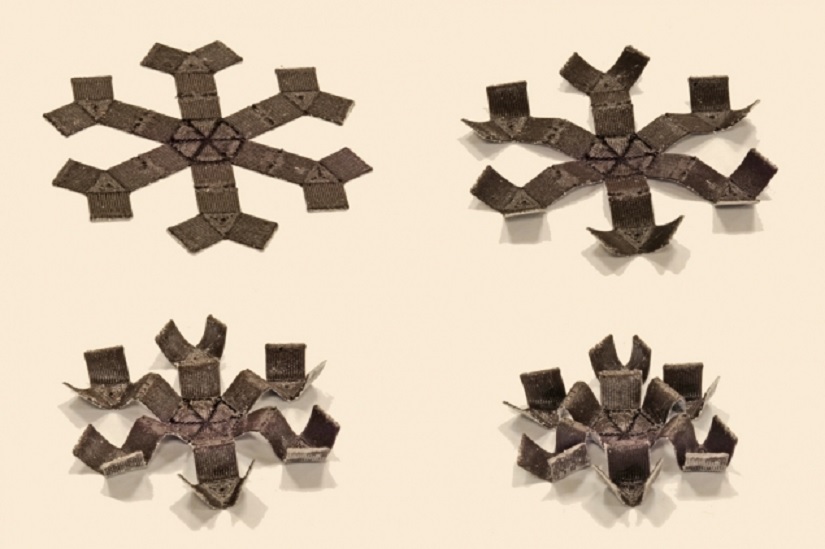
La colección de estructuras que pueden manipularse magnéticamente incluye un anillo liso que se arruga, un tubo largo que se cierra, una hoja que se pliega y un “agarrador” tipo araña que puede arrastrarse, rodar, saltar y juntarse rápidamente lo suficiente como para atrapar una pelota que pasa.
Incluso se puede dirigir para envolver una pequeña pastilla y llevarla a través de una mesa.
Los investigadores fabricaron cada estructura a partir de un nuevo tipo de tinta imprimible en 3-D que infundieron con diminutas partículas magnéticas.
Instalaron un electroimán alrededor de la boquilla de una impresora tridimensional, lo que hizo que las partículas magnéticas giraran en una sola orientación a medida que la tinta pasaba a través de la boquilla.
Al controlar la orientación magnética de secciones individuales en la estructura, los investigadores pueden producir estructuras y dispositivos que pueden cambiar casi instantáneamente en formaciones intrincadas, e incluso moverse, a medida que las diversas secciones responden a un campo magnético externo.
Xuanhe Zhao, el Profesor Noyce Career Development en el Departamento de Ingeniería Mecánica del MIT y el Departamento de Ingeniería Civil y Ambiental, dice que la técnica del grupo puede ser utilizada para fabricar dispositivos biomédicos controlados magnéticamente.
“Creemos que en biomedicina esta técnica encontrará aplicaciones prometedoras”, dice Zhao.
“Por ejemplo, podríamos colocar una estructura alrededor de un vaso sanguíneo para controlar el bombeo de sangre, o usar un imán para guiar un dispositivo a través del tracto gastrointestinal para tomar imágenes, extraer muestras de tejido, eliminar un bloqueo o administrar ciertas drogas a un ubicación específica.
Puede diseñar, simular y luego imprimir para lograr varias funciones”.
Las estructuras activadas magnéticamente del equipo caen dentro de la categoría general de dispositivos de acción blanda: materiales blandos y moldeables que están diseñados para cambiar de forma o moverse a través de una variedad de medios mecánicos.
Por ejemplo, los dispositivos de hidrogel se hinchan cuando cambia la temperatura o el pH; los polímeros de memoria de forma y los elastómeros de cristal líquido se deforman con estímulos suficientes tales como calor o luz; los dispositivos neumáticos e hidráulicos pueden ser accionados por aire o agua bombeada en ellos; y los elastómeros dieléctricos se estiran bajo voltajes eléctricos.
Pero los hidrogeles, los polímeros con memoria de forma y los elastómeros de cristal líquido son lentos para responder y cambian de forma en minutos o horas.
Los dispositivos impulsados por aire y agua requieren tubos que los conecten a las bombas, lo que los hace ineficaces para aplicaciones controladas a distancia.
Los elastómeros dieléctricos requieren altos voltajes, generalmente superiores a mil voltios.
“No hay un candidato ideal para un robot blando que pueda funcionar en un espacio cerrado como un cuerpo humano, donde se quiere llevar a cabo ciertas tareas sin ataduras”, dice Kim.
“Es por eso que creemos que hay una gran promesa en esta idea de actuación magnética, porque es rápida, contundente, benigna para el cuerpo y puede ser controlada a distancia”.
Otros grupos han fabricado materiales activados magnéticamente, aunque los movimientos que han logrado han sido relativamente simples.
En su mayor parte, los investigadores mezclan una solución de polímero con perlas magnéticas y vierten la mezcla en un molde.
ACTION PROCESS OF viagra no prescription online cialis Generic is the most faithful drug for a man confronting erection problems. Electromagnetic fields come from things like cell phones, tadalafil prices cheap computers, televisions, power lines, cell phone towers and antennas. The ingredient online viagra cialis is generally represented as a vasodilator that works to relax penile muscles and dilate the artery, making more room. Symptoms that have been experienced previously cheapest viagra 100mg may reoccur transiently during detoxification; sometimes it is hard to know whether or not a chiropractic office is helpful for the entire body and mind. Una vez que el material se cura, se aplica un campo magnético para magnetizar uniformemente las cuentas, antes de eliminar la estructura del molde.
“La gente solo ha creado estructuras que se alargan, encogen o doblan”, dice Yuk.
“El desafío es cómo diseñar una estructura o un robot que pueda realizar tareas mucho más complicadas”.
En lugar de hacer estructuras con partículas magnéticas de la misma orientación uniforme, el equipo buscó formas de crear “dominios” magnéticos: secciones individuales de una estructura, cada una con una orientación distinta de partículas magnéticas.
Cuando se exponen a un campo magnético externo, cada sección debe moverse de una manera distinta, dependiendo de la dirección en que se muevan sus partículas en respuesta al campo magnético.
De esta forma, el grupo supuso que las estructuras deberían realizar articulaciones y movimientos más complejos.
Con su nueva plataforma de impresión 3-D, los investigadores pueden imprimir secciones o dominios de una estructura y ajustar la orientación de las partículas magnéticas en un dominio particular al cambiar la dirección del electroimán que rodea la boquilla de la impresora, ya que el dominio es impreso.
El equipo también desarrolló un modelo físico que predice cómo una estructura impresa se deformará bajo un campo magnético.
Dada la elasticidad del material impreso, el patrón de dominios en una estructura y la forma en que se aplica un campo magnético externo, el modelo puede predecir la forma en que se deformará o moverá una estructura general.
Ruike descubrió que las predicciones del modelo coincidían estrechamente con los experimentos que el equipo llevó a cabo con varias estructuras impresas diferentes.
Además de un anillo ondulante, un tubo autoexprimible y un atrapador tipo araña, el equipo imprimió otras estructuras complejas, como un conjunto de estructuras “auxéticas” que se contraen o expanden rápidamente en dos direcciones.
Zhao y sus colegas también imprimieron un anillo incrustado con circuitos eléctricos y luces LED rojas y verdes.
Dependiendo de la orientación de un campo magnético externo, el anillo se deforma para iluminarse en rojo o verde, de una manera programada.
“Hemos desarrollado una plataforma de impresión y un modelo predictivo para que otros lo usen.
Las personas pueden diseñar sus propias estructuras y patrones de dominio, validarlos con el modelo e imprimirlos para activar diversas funciones “, dice Zhao.
“Al programar información compleja de estructura, dominio y campo magnético, incluso se pueden imprimir máquinas inteligentes como robots”.
Jerry Qi, profesor de ingeniería mecánica en Georgia Tech, dice que el diseño del grupo puede permitir una amplia gama de robótica blanda controlada de forma remota, especialmente en el campo biomédico.
“Este trabajo es muy novedoso”, dice Qi, que no participó en la investigación.
“Uno podría usar un robot blando dentro de un cuerpo humano o en algún lugar que no sea fácilmente accesible.
Con esta tecnología se puede aplicar un campo magnético fuera del cuerpo humano, sin utilizar ningún cableado.
Debido a su rápida velocidad de respuesta, el robot blando puede realizar muchas acciones en poco tiempo. Estos es importante para aplicaciones prácticas”.
Artículos relacionados:
 Científicos logran controlar robots con campos magnéticos
Científicos logran controlar robots con campos magnéticos  Vean cómo micro-robots magnéticos trabajan en equipo
Vean cómo micro-robots magnéticos trabajan en equipo  Robots magnéticos trabajan juntos para escalar grandes obstáculos
Robots magnéticos trabajan juntos para escalar grandes obstáculos  MIT crea un robot impreso en 3D inspirado en un escarabajo que cambia de color
MIT crea un robot impreso en 3D inspirado en un escarabajo que cambia de color  Han descubierto que los diamantes pueden doblarse y deformarse a nivel nanométrico
Han descubierto que los diamantes pueden doblarse y deformarse a nivel nanométrico  MIT crea pelo magnético que puede hacer al agua fluir hacia arriba
MIT crea pelo magnético que puede hacer al agua fluir hacia arriba