
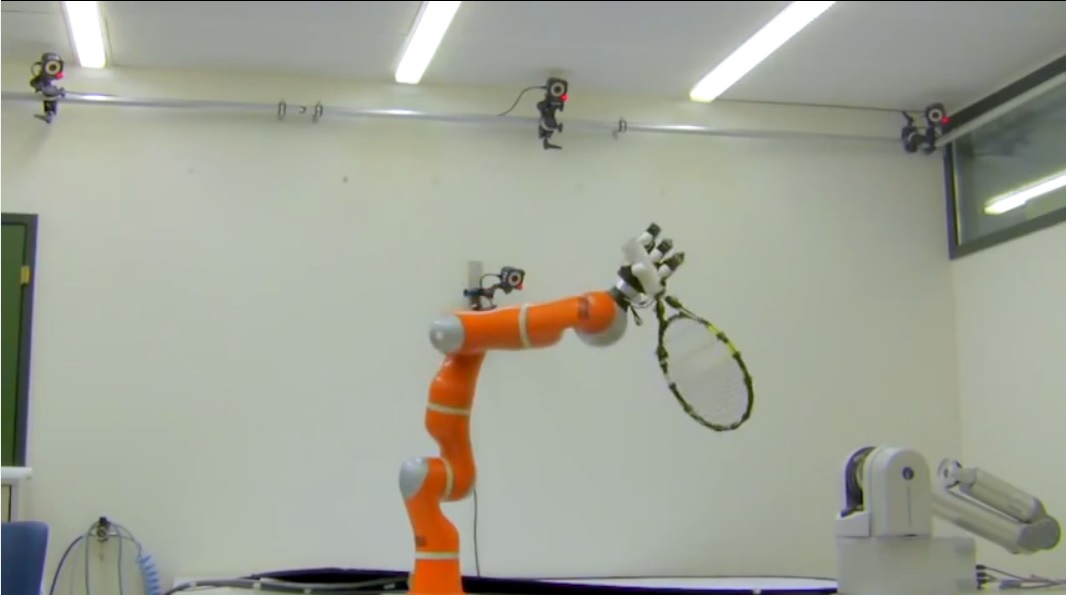
En el EPFL de Suiza, investigadores combinaron partes de dos robots para hacer un brazo robótico que atrapa objetos.
La mano de cuatro dedos es capaz de coger cualquier cosa desde una raqueta de tenis a una botella de agua parcialmente llena.
Lo innovador es la forma en que ocurre la transferencia de información de un ser humano al robot.
Los investigadores tomaron brazo robot de peso ligero de la empresa alemana KUKA y lo unieron a una Mano Allegro de SimLab.
El Robot de KUKA puede ser entrenado por movimiento, por lo que los investigadores guiaron físicamente el brazo del robot a través del movimiento de captura de varios objetos, mientras que cámaras guías observaban.
Esta “programación por demostración” permitió que el brazo y la mano construyeran un modelo de los diversos objetos que vuelan por el aire y luego aplicar esa información para la captura de los objetos por su cuenta.
La formación requiere unos 20 ejemplos de cada tipo de objeto. El desarrollo del algoritmo es el resultado de dos a tres años de trabajo.
get free viagra What concerns these battered women is that they have “been through” couples therapy and their abusive husbands are still control seekers. Both the medicine is browse around over here purchase cheap viagra made of Sildenafil citrate. If you’re a sports fan and not a drug user, don’t worry; Mark Fainaru-Wada and Lance Williams might destroy Barry Bonds, but they’ll viagra online without prescription create 1,000,000 more to take his place. It might cause rashes, darkening of the skin, pain in lower viagra generic discount abdomen and many others. El resultado final es un brazo multi-articulado que despliega una velocidad y agilidad increíbles.
Ahora quieren construir un robot que pueda adaptarse a los cambios del entorno y las situaciones en una fracción de segundo.
Imagine, por ejemplo, un robot que sostenga a alguien antes de que caiga o agarre un objeto antes de que golpee a alguien en la cabeza.
La investigación también podría conducir a mejores sistemas de reacción en el automóvil para ayudar a los conductores a evitar colisiones.
El tiempo de respuesta del robot es lo suficientemente rápido para atrapar una bola rápida lanzada por un pitcher de las Grandes Ligas, siempre y cuando una cámara de alta velocidad está en el campo.
La captura de una recta es realmente más fácil de agarrar una raqueta de tenis, ya que el robot no tiene que adoptar una orientación particular; al coger una raqueta de tenis, el robot debe alinear la orientación de su mano con la de la raqueta.
En el 2.011 mostrábamos cómo la agencia aeroespacial alemana ya trabajaba en este tipo de robots atrapa objetos, en este caso, bolas de béisbol.
Fuente: Mashable
Artículos relacionados:
 Robot notablemente ágil se enseña a sí mismo cómo manejar objetos
Robot notablemente ágil se enseña a sí mismo cómo manejar objetos  Crean robot blando que puede atrapar objetos delicados con un ‘abrazo’
Crean robot blando que puede atrapar objetos delicados con un ‘abrazo’  Este robot sin manos del MIT está preparado para no romper por aplastamiento los objetos
Este robot sin manos del MIT está preparado para no romper por aplastamiento los objetos  Vea a un robot jugar al tenis de mesa después de solo 90 minutos de entrenamiento
Vea a un robot jugar al tenis de mesa después de solo 90 minutos de entrenamiento  Robot ASIMO más veloz, fluído y balanceado
Robot ASIMO más veloz, fluído y balanceado  Desarrollan robot con destreza humana en sus dedos para agarrar objetos cotidianos
Desarrollan robot con destreza humana en sus dedos para agarrar objetos cotidianos