
Un nuevo sistema para permitirles a robots blandos adoptar formas específicas y mantenerlas podría representar un avance decisivo en el progreso de los robots de este tipo.
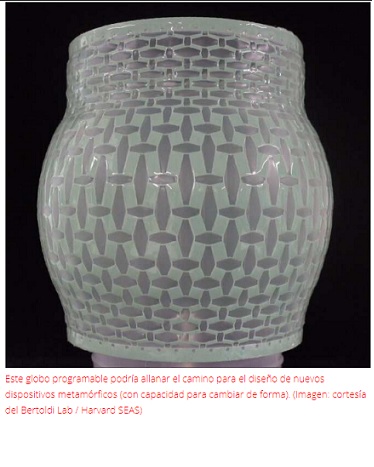
Investigadores de la Escuela John A. Paulson de Ingeniería y Ciencias Aplicadas (SEAS, por sus siglas en inglés), entidad vinculada a la Universidad de Harvard en Estados Unidos, han diseñado materiales que pueden controlar y moldear un globo en formas preprogramadas.
El sistema utiliza láminas de kirigami (finas láminas con cortes periódicos), incrustadas en un dispositivo inflable.
A medida que el globo se expande, los cortes en la hoja de kirigami guían el crecimiento, permitiendo la expansión en algunos lugares y constriñéndolo en otros.
El equipo de Katia Bertoldi consiguió controlar la expansión no solo globalmente para hacer formas a gran escala, sino también localmente para generar pequeños rasgos.
El equipo también desarrolló una estrategia de diseño inverso, un algoritmo que encuentra el diseño óptimo para que el dispositivo inflable de kirigami emule la forma deseada al inflarse.
El siguiente paso en esta línea de investigación y desarrollo será utilizar estos globos de kirigami como actuadores de cambio de forma para robots blandos.
El trabajo sienta las bases para el diseño de estructuras a múltiples escalas: desde microdispositivos quirúrgicos mínimamente invasivos hasta macroestructuras para la exploración espacial.
Fuente: Noticias de la Ciencia
Artículos relacionados:
 Robots blandos para interacción física con humanos
Robots blandos para interacción física con humanos  Robots blandos que imitan músculos para ayudar en terapia física
Robots blandos que imitan músculos para ayudar en terapia física  Inteligencia artificial y piel con sensibilidad táctil artificial para mejorar la interacción de robots blandos con su entorno
Inteligencia artificial y piel con sensibilidad táctil artificial para mejorar la interacción de robots blandos con su entorno  Estos robots blandos ‘sudan’ para mantenerse frescos
Estos robots blandos ‘sudan’ para mantenerse frescos  Nuevos músculos artificiales para robots blandos
Nuevos músculos artificiales para robots blandos  Logran fabricación rápida y barata de robots blandos
Logran fabricación rápida y barata de robots blandos