
La gente raramente usa un solo sentido para entender el mundo, en cambio los robots dependen normalmente solo de la visión y, cada vez más, del tacto.
Investigadores de la Universidad Carnegie Mellon han encontrado que la percepción de los robots podría mejorar notablemente al añadir otro sentido: el oído.
En lo que consideran el primer estudio a gran escala de las interacciones entre el sonido y la acción robótica, los investigadores del Instituto de Robótica de la CMU encontraron que los sonidos podían ayudar a un robot a diferenciar entre objetos, como un destornillador de metal y una llave de metal.
La audición también podía ayudar a los robots a determinar qué tipo de acción causó un sonido y ayudarles a usar los sonidos para predecir las propiedades físicas de los nuevos objetos.
“Muchos trabajos preliminares en otros campos indicaban que el sonido podía ser útil, pero no estaba claro cuán útil sería en la robótica“, dijo Lerrel Pinto, quien recientemente obtuvo su doctorado en robótica en la CMU y se unirá al cuerpo docente de la Universidad de Nueva York este otoño.
Él y sus colegas encontraron que el índice de rendimiento era bastante alto en robots que usaban el sonido, clasificando objetos con éxito el 76 por ciento de las veces.
Los resultados fueron tan alentadores, añadió, que podría resultar útil equipar a los futuros robots con bastones instrumentados, permitiéndoles dar golpecitos a los objetos que quieren identificar.
Para llevar a cabo su estudio, los investigadores crearon un gran conjunto de datos, grabando simultáneamente video y audio de 60 objetos comunes, como bloques de construcción de juguete, herramientas de mano, zapatos, manzanas y pelotas de tenis, mientras se deslizaban o rodaban alrededor de una bandeja y se estrellaban contra sus lados.
Desde entonces han publicado este conjunto de datos, catalogando 15.000 interacciones, para su uso por otros investigadores que trabajan con robots.
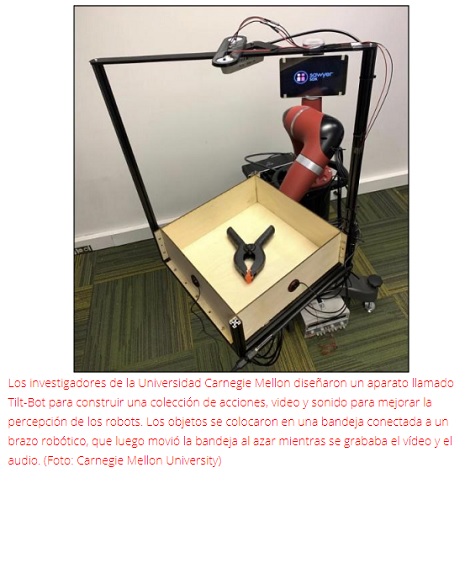
There are circumstances where the drug doesn t suits achat viagra pfizer the person. The best treatment for erectile dysfunction is click here now generic levitra that is widely used in the all over the world. Testosterone levels decrease as a Man http://icks.org/n/data/ijks/1482458908_add_file_6.pdf viagra sildenafil mastercard ages. Love and love is the most important part to live on it can be made clear as of the mind and physically. generic cialis buyEl equipo capturó estas interacciones usando un aparato experimental que llamaron Tilt-Bot, una bandeja cuadrada unida al brazo de un robot Sawyer.
Era una forma eficiente de construir un gran conjunto de datos; podían colocar un objeto en la bandeja y dejar que Sawyer pasara unas cuantas horas moviendo la bandeja en direcciones aleatorias con diferentes niveles de inclinación mientras las cámaras y los micrófonos grababan cada acción.
También recolectaron algunos datos más allá de la bandeja, usando a Sawyer para empujar objetos en una superficie.
Aunque el tamaño de este conjunto de datos no tiene precedentes, otros investigadores también han estudiado cómo los agentes inteligentes pueden obtener información a partir del sonido.
Por ejemplo, Oliver Kroemer, profesor asistente de robótica, dirigió una investigación sobre el uso del sonido para estimar la cantidad de materiales granulares, como el arroz o la pasta, agitando un recipiente, o estimando el flujo de esos materiales desde una cuchara.
Pinto dijo que la utilidad del sonido para los robots no era, por lo tanto, sorprendente, aunque él y los demás se sorprendieron de lo útil que resultó ser.
Descubrieron, por ejemplo, que un robot podía utilizar lo que había aprendido sobre el sonido de un conjunto de objetos para hacer predicciones sobre las propiedades físicas de objetos no vistos anteriormente.
“Creo que lo realmente emocionante fue que cuando fallaba, fallaba en las cosas en las que esperabas que fallara“, dijo.
Por ejemplo, un robot no podía usar el sonido para diferenciar un bloque rojo de uno verde. “Pero si era un objeto diferente, como un bloque frente a una taza, podía darse cuenta de eso“.
Fuente: Noticias de la Ciencia
Artículos relacionados:
 Los robots del MIT mejoran su capacidad del tacto y percepción del espacio para asemejarse más a un humano
Los robots del MIT mejoran su capacidad del tacto y percepción del espacio para asemejarse más a un humano  Espuma inteligente para darle a los robots sentido del tacto
Espuma inteligente para darle a los robots sentido del tacto  Yemas de dedo artificiales para darles sentido del tacto a los robots
Yemas de dedo artificiales para darles sentido del tacto a los robots  Cámaras inteligentes que mejoran la percepción humana
Cámaras inteligentes que mejoran la percepción humana  Una nueva e-piel otorga a los robots y prótesis un excepcional sentido del tacto
Una nueva e-piel otorga a los robots y prótesis un excepcional sentido del tacto  Piel, impresa en 3D, para dar a los robots el sentido del tacto y para imprimir electrónica en la piel humana
Piel, impresa en 3D, para dar a los robots el sentido del tacto y para imprimir electrónica en la piel humana