
El mundo de los robots blandos todavía tiene un largo camino por recorrer antes de que puedan agarrar cosas con precisión y con la fuerza adecuada.
Investigadores del Laboratorio de Ciencias de la Computación e Inteligencia Artificial (CSAIL) del MIT se asociaron con el Instituto de Investigación de Toyota (TRI) para desarrollar un sistema que permite a los robots blandos agarrar herramientas y aplicar la cantidad de fuerza adecuada para una tarea determinada, ya sea escurrir líquidos o escribir.
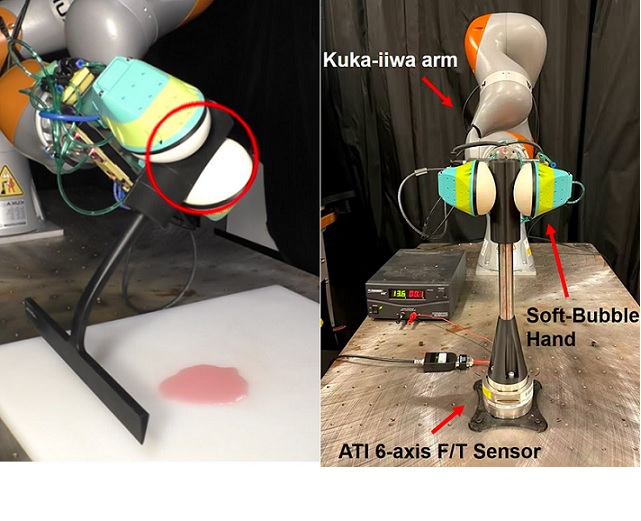
Este sistema, denominado Serie de Efectores de Extremo Elástico (SEED), consta de pinzas robóticas de burbujas blandas con cámaras integradas para mapear cómo se deforman en un espacio de seis dimensiones para aplicar la fuerza correcta a una herramienta.
Usando seis grados de libertad, este objeto se puede mover hacia la izquierda/derecha, arriba o abajo, atrás/adelante, balanceo, cabeceo y guiñada.
El controlador de circuito cerrado utiliza SEED, junto con retroalimentación visuotáctil, para ajustar la posición del brazo del robot a fin de aplicar la fuerza deseada.
Fuente: MIT
Artículos relacionados:
 Robots de Toyota han aprendido a limpiar superficies brillantes y agarrar objetos blandos
Robots de Toyota han aprendido a limpiar superficies brillantes y agarrar objetos blandos  Crean globos con control de forma para robots blandos
Crean globos con control de forma para robots blandos  Dedos robóticos blandos y suaves ideales para agarrar medusas
Dedos robóticos blandos y suaves ideales para agarrar medusas  Inteligencia artificial ayuda a los robots a agarrar y mover objetos con facilidad
Inteligencia artificial ayuda a los robots a agarrar y mover objetos con facilidad  Nuevos músculos artificiales para robots blandos
Nuevos músculos artificiales para robots blandos  Robots blandos que imitan músculos para ayudar en terapia física
Robots blandos que imitan músculos para ayudar en terapia física