
Los robots cuadrúpedos han surgido como agentes versátiles capaces de moverse y manipular en entornos complejos.
Los diseños tradicionales normalmente se basan en las partes inherentes del cuerpo del robot o incorporan brazos montados en la parte superior para tareas de manipulación.
Sin embargo, estas configuraciones pueden limitar la destreza operativa, la eficiencia y la adaptabilidad del robot, particularmente en espacios desordenados o limitados.
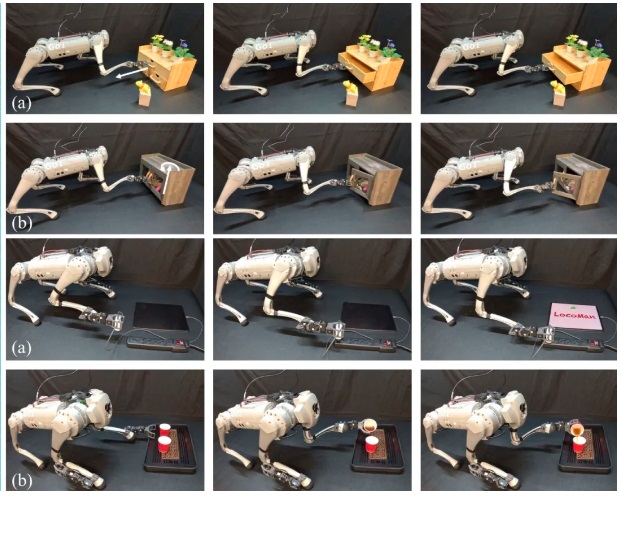
LocoMan es un diestro robot cuadrúpedo con una morfología novedosa para realizar manipulaciones versátiles en diversos entornos restringidos.
Al equipar un robot Unitree Go1 con dos manipuladores modulares 3-DoF livianos y de bajo costo en sus pantorrillas delanteras, LocoMan aprovecha la movilidad y funcionalidad combinadas de las piernas y las pinzas para tareas de manipulación complejas que requieren un posicionamiento preciso en 6D del efector final en un amplio espacio de trabajo.
Para aprovechar las capacidades de manipulación locomotora de LocoMan, se presenta un marco de control unificado que extiende el controlador de cuerpo entero (WBC) para integrar la dinámica de los manipuladores locomotores.
A través de experimentos, se validó que el controlador de cuerpo entero propuesto puede seguir de manera precisa y estable las trayectorias 6D deseadas del efector final y el torso, lo que, cuando se combina con el gran espacio de trabajo, facilita un conjunto diverso de desafiantes tareas de manipulación locomotora en espacios reducidos, como abrir puertas, enchufar enchufes, recoger objetos en espacios estrechos y bajos y manipulación bimanual.
Fuente: arXiv
Artículos relacionados:
 Robot versátil de propósito general con inteligencia artificial
Robot versátil de propósito general con inteligencia artificial  Robot con inteligencia artificial capaz de moverse de forma cuadrúpeda y bípeda
Robot con inteligencia artificial capaz de moverse de forma cuadrúpeda y bípeda  Desarrollan robot con destreza humana en sus dedos para agarrar objetos cotidianos
Desarrollan robot con destreza humana en sus dedos para agarrar objetos cotidianos  Robot aéreo articulado manipula, mueve y agarra objetos durante el vuelo
Robot aéreo articulado manipula, mueve y agarra objetos durante el vuelo  Robot con inteligencia artificial realiza tareas simples a una velocidad equivalente a la humana
Robot con inteligencia artificial realiza tareas simples a una velocidad equivalente a la humana  Manos de robot diseñadas por Toyota hechas con agarres blandos
Manos de robot diseñadas por Toyota hechas con agarres blandos