
En el laboratorio CREATE de EPFL, bajo la dirección de Josie Hughes, se ha logrado un gran avance en el ámbito de la robótica blanda.
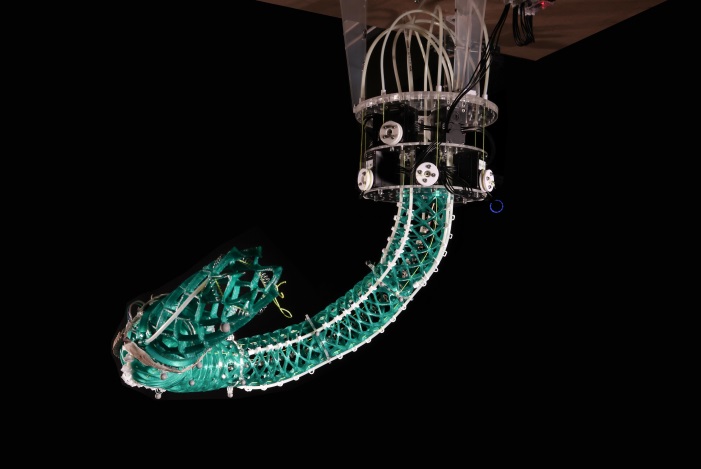
Inspirándose en el movimiento versátil de las trompas de los elefantes y los tentáculos de los pulpos, el equipo presentó el helicoidal recortado, una novedosa estructura robótica que promete una mayor conformidad y control en los diseños robóticos.
Con una combinación de aguda observación biológica y modelado computacional, los investigadores han presentado ahora un brazo robótico blando capaz de realizar tareas complejas, garantizando interacciones más seguras entre humanos y robots.
Los hallazgos, que detallan tanto la estructura como la metodología, son una colaboración con el Departamento de Robótica Cognitiva de TU Delft.
El profesor Hughes destacó la importancia de este desarrollo:
“Mediante la invención de una nueva estructura arquitectónica, el helicoidal recortado, hemos diseñado un brazo robótico que destaca en control, rango de movimiento y seguridad.
Cuando la novedosa arquitectura se combina con actuación distribuida, donde se colocan múltiples actuadores a lo largo de una estructura o dispositivo, este brazo robótico tiene un amplio rango de movimiento, alta precisión y es inherentemente seguro para la interacción humana”.
Mientras que los robots tradicionales son rígidos, lo que a menudo los hace inadecuados para tareas delicadas o interacciones humanas cercanas, el brazo robótico blando de CREATE está diseñado para interacciones más seguras con humanos y adaptabilidad a una gama más amplia de tareas.
Con una combinación sin precedentes de flexibilidad y precisión, la naturaleza blanda y flexible del brazo reduce los riesgos potenciales durante las interacciones entre humanos y robots.
Esto abre las puertas para su aplicación en atención médica, cuidado de personas mayores y más.
A diferencia de sus homólogos rígidos, el brazo robótico blando puede adaptarse a diferentes formas y superficies, lo que lo convierte en una herramienta ideal para tareas complejas como recoger frutas o manipular artículos frágiles.
En la industria, podría convertirse en la solución ideal para líneas de montaje delicadas, trabajando junto a los humanos, aumentando su capacidad en lugar de reemplazarlos.
La industria agrícola también podría beneficiarse de su trato gentil en el manejo de los cultivos, acompañando a los trabajadores para disminuir su carga de trabajo durante los períodos intensos de cosecha.
El quid de la investigación radica en la novedosa arquitectura del brazo robótico.
Los investigadores han modificado creativamente una espiral con forma de resorte, a la que llaman “helicoide“, recortando partes de ella para darle diversas funcionalidades.
Este acto aparentemente simple les ha permitido controlar con precisión qué tan flexible o rígida se vuelve la espiral en diferentes direcciones.
Al ajustar su forma, pueden hacer que la parte interior sea resistente a ser aplastada y la parte exterior lo suficientemente flexible como para doblarse fácilmente.
Con este diseño especial, han creado un robot blando que puede moverse y actuar de formas nunca antes vistas, mostrando el tipo de destreza y tacto blando que se encuentran en la naturaleza, como en la trompa de un elefante o el tentáculo de un pulpo.
“Al observar estos animales y desarrollar una estructura arquitectónica novedosa, nuestro objetivo es imitar este rango de movimiento y control que se encuentra en la naturaleza“, señaló Josie Hughes.
Para ello, el equipo empleó modelos informáticos avanzados para convertir las observaciones en resultados tangibles.
Utilizando estos modelos, probaron iterativamente sus innovadores diseños en espiral hasta obtener una forma helicoidal recortada final.
Qinghua Guan y Francesco Stella, quienes encabezaron la creación real del robot, brindaron información sobre el proceso de diseño y optimización:
“Introducimos una superficie específica en el modelo de computadora, luego la recortamos y ajustamos.
Los métodos computacionales nos guían y ayudan a evaluar la estructura geometrica óptima para un máximo espacio de trabajo y cumplimiento”.
¿El resultado? Una creación robótica, inspirada en la naturaleza, pero refinada con preciso ingenio humano y modelado por computadora.
“Al final, nuestros modelos informáticos eran precisos hasta el punto de que sólo tuvimos que construir una versión del brazo”.
Se ha solicitado una patente para este primer manipulador blando comercial y se ha puesto en marcha una empresa conjunta entre EPFL y TU Delft bajo el nombre de Helix Robotics.
Fuente: EPFL
Artículos relacionados:
 Robots blandos para interacción física con humanos
Robots blandos para interacción física con humanos  Inteligencia artificial y piel con sensibilidad táctil artificial para mejorar la interacción de robots blandos con su entorno
Inteligencia artificial y piel con sensibilidad táctil artificial para mejorar la interacción de robots blandos con su entorno  Robot con gran capacidad de interacción social diseñado para cuidar ancianos
Robot con gran capacidad de interacción social diseñado para cuidar ancianos  Por primera vez un robot consigue despegar, volar y aterrizar un avión de forma autónoma y sin humanos a bordo
Por primera vez un robot consigue despegar, volar y aterrizar un avión de forma autónoma y sin humanos a bordo  Desarrollan material gelatinoso, 80% agua, que puede soportar el peso de un elefante y recuperar su forma original
Desarrollan material gelatinoso, 80% agua, que puede soportar el peso de un elefante y recuperar su forma original  Robots con airbags, para que las máquinas trabajen en armonía con los humanos
Robots con airbags, para que las máquinas trabajen en armonía con los humanos