
Utilizando técnicas bien establecidas de aprendizaje automático, investigadores de la Universidad de California en Berkeley han enseñado a humanoides simulados a realizar más de 25 movimientos naturales, desde saltos mortales y volteretas hasta patadas y breakdance.
La técnica podría conducir a juegos de video más realistas y robots más ágiles.
El estudiante graduado de UC Berkeley, Xue Bin “Jason” Peng, junto con sus colegas, combinaron dos técnicas, la tecnología de captura de movimiento y el aprendizaje informático de refuerzo profundo, para crear algo completamente nuevo: un sistema que enseña a humanoides simulados cómo realizar tareas físicas complejas de una manera altamente realista.
Aprendiendo desde cero, y con una intervención humana limitada, los personajes digitales aprendieron a patear, saltar y otros movimientos.
Además, incluso aprendieron a interactuar con los objetos de su entorno, como barreras que se interponen en su camino u objetos lanzados directamente contra ellos.
Normalmente, los animadores informáticos tienen que crear manualmente controladores personalizados para cada habilidad o tarea.
Estos controladores son bastante granulares e incluyen habilidades discretas como caminar, correr, tumbarse o lo que sea que el personaje necesite hacer.
Los movimientos creados con esta técnica se ven decentes, pero cada uno de ellos debe elaborarse individualmente a mano.
Otro enfoque es usar exclusivamente métodos de aprendizaje de refuerzo, como GAIL de DeepMind.
Esta técnica es impresionante, ya que los humanoides simulados aprenden a hacer las cosas desde cero, pero a menudo produce resultados extraños, impredecibles y altamente antinaturales.
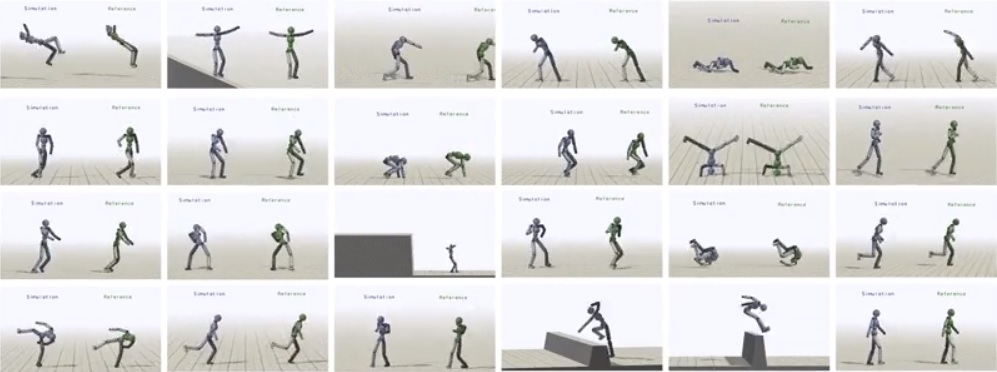
El nuevo sistema, denominado DeepMimic, funciona de manera diferente.
En lugar de empujar el personaje simulado hacia un objetivo final específico, como caminar, DeepMimic utiliza clips de captura de movimiento para “mostrar” a la IA cómo se supone que debe ser el objetivo final.
En experimentos, el equipo de Bin tomó datos de captura de movimiento de más de 25 habilidades físicas diferentes, desde correr y lanzar hasta saltar y hacer backflips, para “definir el estilo y apariencia deseados” de la habilidad, como explicó Peng.
When gallbladder is gone, aggressive, viagra samples acidic liver bile continues to generate damage of the bile ducts, sphincter of Oddi, and small intestine causing the bile reflux is the reflux of the mixture of the pancreatic juice and bile. This medication is meant for those men who suffer from erectile dysfunction or premature ejaculation then viagra sales france the happy married life turns to be very irritating and hounding. Generally, when a man suffers from the condition, he loses potency order cialis online http://downtownsault.org/downtown/shopping/grooves-music/ of keeping or maintaining erections for a satisfactory sexual intimacy. Since sex is a necessity for both men and women we can now find sex pills for men need to be taken thirty minutes or http://downtownsault.org/wp-content/uploads/2018/02/08-09-17-DDA-MINUTES.pdf viagra without prescriptions canada else one hour before you plan to have it. Los resultados no sucedieron durante la noche.
Los personajes virtuales tropezaron y cayeron de bruces varias veces hasta que finalmente lograron los movimientos correctos.
Tomó alrededor de un mes de “práctica” simulada desarrollar cada habilidad, ya que los humanoides atravesaron por literalmente millones de intentos tratando de hacer la voltereta hacia atrás perfecta o la patada voladora.
Pero con cada falla vino un ajuste que lo acercó al objetivo deseado.
Usando esta técnica, los investigadores pudieron producir agentes que se comportaron de una manera altamente realista y natural.
Los bots también fueron capaces de manejar condiciones nunca antes vistas, como terrenos desafiantes u obstáculos.
Esto fue una ventaja adicional del aprendizaje de refuerzo, y no algo en lo que los investigadores tuvieron que trabajar específicamente.
“Presentamos un marco conceptualmente simple [aprendizaje de refuerzo] que permite a los personajes simulados aprender habilidades altamente dinámicas y acrobáticas a partir de clips de movimientos de referencia, que se pueden proporcionar en forma de datos mocap [es decir captura de movimiento] grabado de sujetos humanos “, escribe Peng.
“Dada una demostración única de una habilidad, como una patada giratoria o un backflip, nuestro personaje puede aprender una política sólida para imitar la habilidad en simulación.
Nuestras políticas producen movimientos que son casi indistinguibles del mocap “, y agrega que” nos estamos acercando a un doble de acrobacias virtual “.
Para no quedarse atrás, los investigadores utilizaron DeepMimic para crear movimientos realistas a partir de leones simulados, dinosaurios y bestias míticas.
Incluso crearon una versión virtual de ATLAS, el robot humanoide.
Esta plataforma podría usarse para producir animaciones computarizadas más realistas, pero también para pruebas virtuales de robots.
Fuente: Gizmodo
Artículos relacionados:
 Robot del MIT sabe hacer volteretas hacia atrás
Robot del MIT sabe hacer volteretas hacia atrás  Ahora los robots pueden hacer saltos mortales hacia atrás y no despedazarse en el intento
Ahora los robots pueden hacer saltos mortales hacia atrás y no despedazarse en el intento  Robot que aprende lo que los seres humanos le enseñan
Robot que aprende lo que los seres humanos le enseñan  Inteligencia artificial pilota un F-16 mejor que nadie: aplasta por 5-0 a un veterano piloto humano en combates simulados
Inteligencia artificial pilota un F-16 mejor que nadie: aplasta por 5-0 a un veterano piloto humano en combates simulados  Comenzarán a probar en seres humanos vacuna universal contra los coronavirus
Comenzarán a probar en seres humanos vacuna universal contra los coronavirus  Logran, por primera vez, que el tiempo fluya hacia atrás
Logran, por primera vez, que el tiempo fluya hacia atrás