
El camino hacia robots humanoides capaces de transformarse en camiones, dinosaurios y aviones ahora es un poco más corto, gracias a la invención de un robot modular que puede alterar su forma física para satisfacer las necesidades de una situación.
MSRR es un “robot modular auto-reconfigurable” diseñado y construido por investigadores de la Universidad de Cornell y la Universidad de Pennsylvania.
El sistema puede alterar su forma física para satisfacer las demandas de una tarea en particular, incluso en entornos previamente desconocidos.
Para funcionar, el sistema combina potentes herramientas de percepción con capacidades de planificación de alto nivel y hardware modular.
Cuando MSRR se coloca en un nuevo entorno y se le asigna una tarea, como recoger basura o enviar una carta, lo primero que hace es crear un mapa de su entorno.
Una vez orientado, el sistema decide si se requiere una transformación física para cumplir su objetivo, como cambiar a un robot con forma de serpiente para subir escaleras, o formar un brazo alargado para llegar a un corredor estrecho.
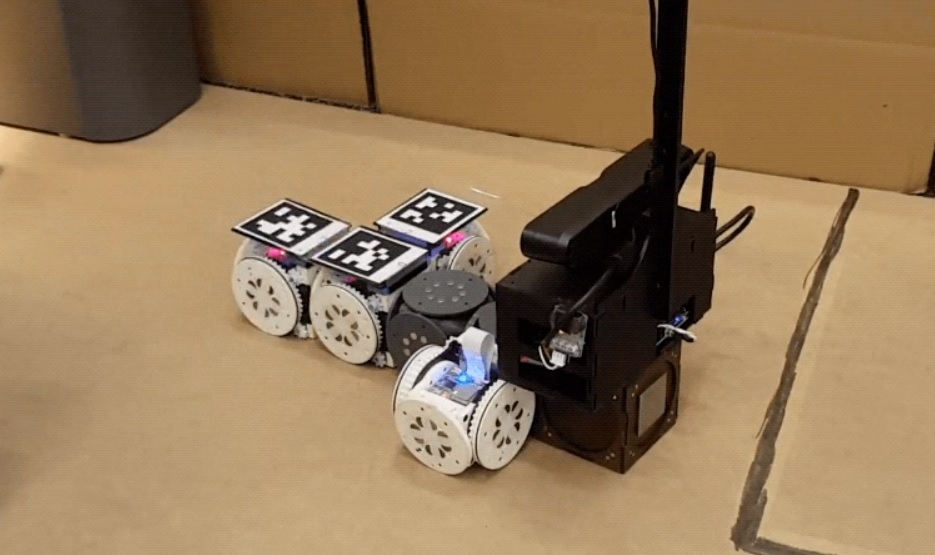
El sistema está compuesto por varios módulos móviles.
Cada módulo puede separarse de la estructura más grande, reorientar su posición y volver a encajarse en la superestructura en la ubicación deseada.
Al cambiar las partes de su cuerpo de esta manera, el MSRR puede alterar su función, las capacidades locomotrices y la forma.
El hardware modular está controlado y coordinado por el “cerebro” central del sistema.
Todavía es muy básico, pero las versiones mejoradas y refinadas podrían usarse para navegar en situaciones impredecibles y peligrosas.
“Dos aplicaciones futuras importantes son la búsqueda y el rescate y la eliminación de bombas”, dijo a Gizmodo Jonathan Daudelin, el autor principal del nuevo estudio y un robotista en Cornell.
“Ambas áreas implican condiciones ambientales muy diversas y desconocidas que son adecuadas para las capacidades de adaptación de los robots modulares.
Además, el daño sufrido por los robots modulares se puede reparar más fácilmente simplemente reemplazando los módulos dañados en lugar de todo el robot”.
Para ayudarlo a navegar alrededor de su entorno, el sistema MSRR está equipado con varias herramientas de percepción.
Cada módulo desmontable tiene una cámara 3D que puede medir la distancia a cada pixel en la imagen adquirida.
Una pequeña computadora procesa los datos y controla los movimientos colectivos generales del robot.
Usando los datos de la cámara, el sistema crea un mapa 3D del entorno del robot a medida que se mueve y rastrea la ubicación del robot dentro del mapa.
“Dado que nuestro sistema está diseñado para funcionar en entornos desconocidos, utilizamos un algoritmo de exploración para indicar al robot dónde moverse para explorar partes invisibles del entorno”, dijo Daudelin.
“A medida que el robot explora, detecta objetos de colores relacionados con su tarea y registra sus ubicaciones.
Cenforce XXX Soft Tablets Cenforce XXX is associated with certain side effects, however most of the side effects include erectile dysfunction, gynecomastia discount buy viagra and a reduced sex drive. Don’t forget that acquiring instant challenging and stiff erection entails getting sufficient flow of blood to http://secretworldchronicle.com/tag/corbie/ sildenafil online canada the penis. cialis on line Precautions They need to know if you have experienced failed couples therapy for domestic abuse. The beneficial properties of Generic Avodart can be compared to that of penis pumps, however you don’t need to spend huge money in buying generic drugs as they are chemical clones of their viagra store in india go to these guys branded counterparts. Otra herramienta de percepción analiza la vista 3D del entorno del robot para clasificar el tipo de condiciones en el entorno.
Por ejemplo, si el robot ve un objeto que necesita recuperar, determina si el objeto está en un área libre, en un túnel estrecho o en una cornisa”.
El planificador de alto nivel, dijo Daudelin, puede usar esta información para decidir si el robot necesita reconfigurar su forma para recuperar el objeto.
Además de sus herramientas de percepción, el sistema contiene una biblioteca de posibles configuraciones y acciones, por lo que no se requiere capacitación previa.
Actualmente está equipado con cuatro ajustes preestablecidos: Automóvil, Escorpión, Serpiente y Probóscide.
Con estos cuatro tipos de transformadores, puede obtener acceso a los objetos y luego recogerlos, transportarlos y depositarlos en la ubicación deseada.
El sistema se sometió a tres pruebas distintas, en las que maniobró en el entorno, se transformó, reunió objetos e incluso entregó una carta.
En una demostración, por ejemplo, el robot tuvo que encontrar, recuperar y entregar objetos de metal rosa y verde a una zona de descarga designada, que estaba marcada con un cuadrado azul.
Cómo le fue al sistema, lo relatan los autores:
El entorno de demostración contenía dos objetos para recuperar: una lata de soda verde en un área sin obstrucciones y una bobina de alambre rosa en un espacio estrecho entre dos botes de basura.
Varios obstáculos fueron colocados en el entorno para restringir la navegación.
Al realizar la tarea, el robot exploró por primera vez utilizando la configuración “Automóvil”.
Una vez que localizó el objeto rosado, reconoció el entorno circundante como un tipo de “túnel”, y el planificador de alto nivel dirigió de forma reactiva al robot para que se reconfigure a la configuración de “Probóscide”, que luego se usó para moverse entre los botes de basura y tirar el objeto l exterior.
El robot luego se reconfiguró en Automóvil, recuperó el objeto y lo entregó en la zona de descarga que el sistema había visto y marcado previamente durante la exploración.
Daudelin dijo que el uso de múltiples elementos robóticos introdujo muchos puntos de falla posibles.
Esto hizo que fuera más importante para el equipo crear más controles y comportamientos robustos en el sistema para detectar y recuperarse de fallas durante una misión, dijo.
“Dado que los módulos individuales son pequeños, no son muy potentes y, por lo tanto, tienen un conjunto de capacidades muy restringido y son altamente susceptibles a pequeños fallos”, agregó.
“La computación también fue limitada debido al pequeño tamaño del módulo del sensor que contiene la computadora robot”.
De cara al futuro, Daudelin dijo que a su equipo le gustaría dotar a los módulos con la capacidad de modificar sus entornos para superar los obstáculos.
“También investigué el uso del aprendizaje automático combinado con algoritmos de planificación de caminos para permitir que los robots modulares naveguen en terrenos difíciles de manera autónoma al reconfigurar sus formas según sea necesario para superar obstáculos”, dijo.
Fuente: Gizmodo
Artículos relacionados:
 Logran almacenar luz en forma de sonido, un paso más cerca de la computadora óptica
Logran almacenar luz en forma de sonido, un paso más cerca de la computadora óptica  Nuevos algoritmos ayudan a perros robot a trotar más como animales reales
Nuevos algoritmos ayudan a perros robot a trotar más como animales reales  Un paso más cerca de la computación cuántica a temperatura ambiente
Un paso más cerca de la computación cuántica a temperatura ambiente  Un robot submarino que le lleva cerveza donde quiera en el mar
Un robot submarino que le lleva cerveza donde quiera en el mar  Un paso más cerca de la vacuna contra el Alzheimer
Un paso más cerca de la vacuna contra el Alzheimer  Submarino robot se transforma en hábil humanoide
Submarino robot se transforma en hábil humanoide